
Incoming Assistant Professor
ME and Texas Robotics
UT Austin
| csferrazza@berkeley.edu | |
| Google Scholar | |
| Bluesky |
I am an incoming assistant professor in robotics at UT Austin. Currently, I am with Amazon Frontiers AI and Robotics (FAR). Until recently, I was a postdoctoral researcher at UC Berkeley, working with Prof.
I received my Ph.D. at ETH Zurich in 2021, under the supervision of Prof.
My Ph.D. thesis was awarded the ETH Medal, and in 2022, I was selected as a Robotics Science and Systems Pioneer. I am also the recipient of an SNSF Postdoctoral Fellowship, a Rising Star Award and a Best Paper Award at the IEEE International Conference on Soft Robotics, and the ETEL Award.
I received a M.Sc. in Robotics, Systems and Control from ETH Zurich in 2016, and a B.Sc. in Automation Engineering from Politecnico di Milano. During my studies, I completed an exchange programme at Tongji University in Shanghai, where I received a Double Bachelor's Degree in Information Technology Engineering (2016).
News
February 2026
- Our work on perceptive humanoid parkour, PHP, is on Arxiv. Check out the social media thread.
- Our work on flow policy gradients for robot control, FPO++, is on Arxiv. Check out the social media thread.
- Our work on robust perceptive humanoid locomotion, RPL, is on Arxiv. Check out the social media thread.
- I gave invited talks at UC Berkeley and Stanford University.
January 2026
- I will be giving an invited lecture at ICVSS, the International Computer Vision Summer School this summer!
December 2025
- I gave a guest lecture at KAIST AI.
- Our work on efficient off-policy RL algorithms for humanoids is on Arxiv. Check out the social media thread.
- We released Holosoma, a full stack open-source library for humanoid sim-to-real learning. Check out the social media thread.
November 2025
- I gave guest lectures at UT Austin and CMU.
October 2025
- I gave invited talks at Cornell University and MILA.
- Our work on augmenting large-scale simulation with Gaussian splats, GaussGym, is on Arxiv. Check out the social media thread.
- Our work on retargeting human data to interaction-preserving humanoid motions, OmniRetarget, is on Arxiv. Check out the social media thread.
September 2025
August 2025
- I joined Amazon Frontiers AI and Robotics (FAR) as a senior research scientist!
July 2025
- We will be hosting a workshop on Tactile Sensing Toward Robot Dexterity and Intelligence at IROS 2025 next October!
June 2025
- Very excited to announce that MuJoCo Playground won the Best Demo Paper Award at RSS 2025!
- I will be traveling to RSS in Los Angeles! We will demo MuJoCo Playground and will host the 2nd edition of the Whole-body Control and Bimanual Manipulation workshop.
- I gave an invited talk at the CVPR Real2Sim workshop.
May 2025
Apr 2025
- I gave invited talks at the CMU Robotics Institute, the University of Washington, and UIUC.
- MuJoCo Playground has been accepted to RSS 2025!
Mar 2025
- I gave invited talks at Harvard University, UCLA, ETH Zurich, and Boston University.
- Two workshop proposals accepted: WCBM@RSS and EXAIT@ICML.
Feb 2025
- I gave invited talks at UT Austin, Johns Hopkins University, and the Max Planck Institute for Intelligent Systems.
- I was selected as a Rising Star in Soft Robotics at IEEE RoboSoft 2025!
- Honored to serve as an Area Chair for CoRL 2025!
Jan 2025
- I gave an invited talk at Northwestern University.
- Two papers, FuSe and HOP, have been accepted to ICRA 2025!
- Two papers, MaxInfoRL and ActSafe, have been accepted to ICLR 2025!
- Our open-source sim-to-real pipeline for robot learning, MuJoCo Playground, is live! Check out the social media thread.
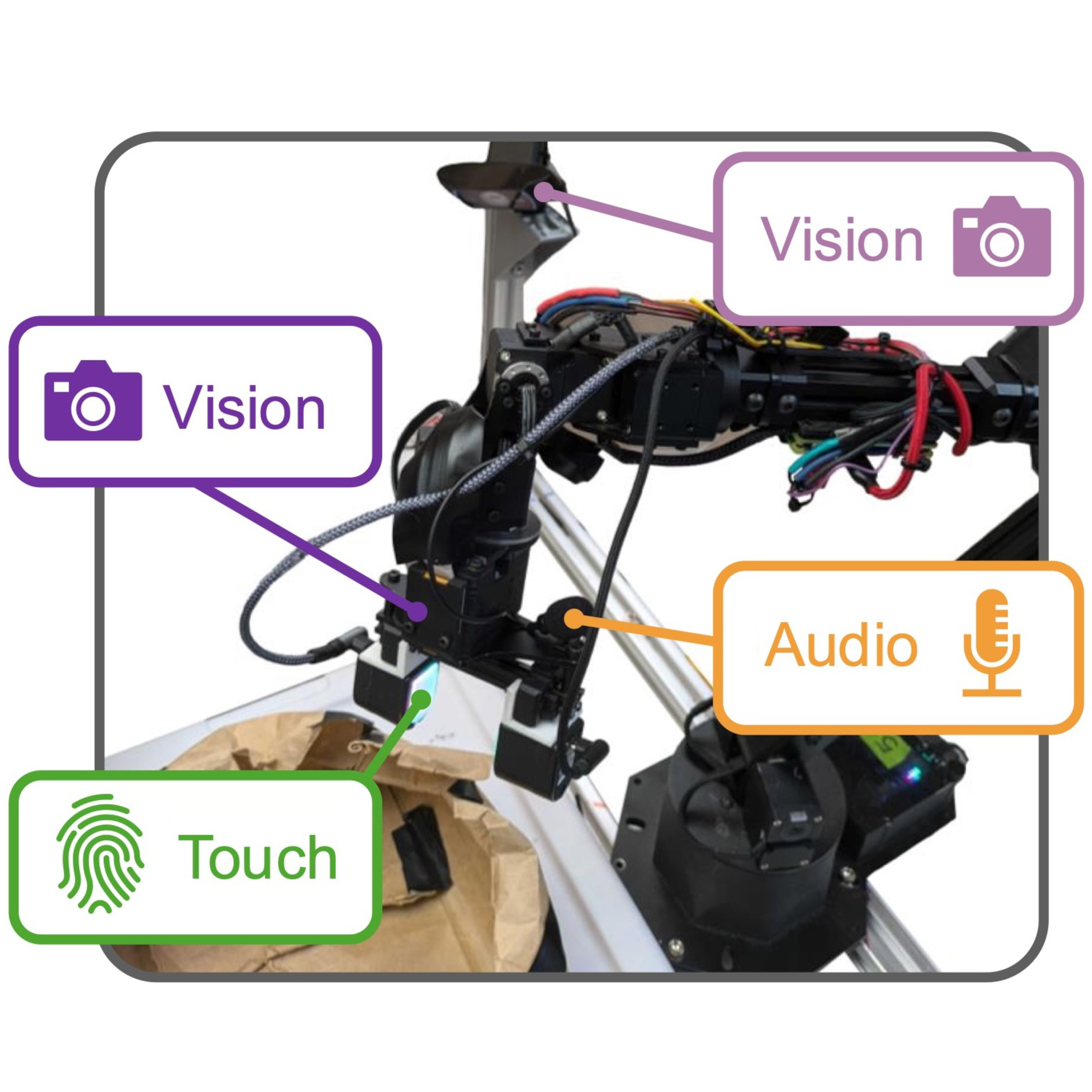
- Our work on finetuning VLAs with heterogeneous sensory data, FuSe, is on Arxiv. Check out the social media thread.
Dec 2024
Nov 2024
- We held the CoRL workshop on Whole-body Control and Bimanual Manipulation: Applications in Humanoids and Beyond. See some pictures here!
- I will also be speaking at the CoRL workshop on Mastering Robot Manipulation in a World of Abundant Data.
- I will be presenting the Body Transformer paper at CoRL in Munich!
- Honored to be selected as a finalist for the Embassy of Italy AI Award!
Oct 2024
- I will be presenting M3L at IROS in Abu Dhabi!
Sep 2024
- Our new work on hand-object interaction pretraining from videos, HOP, is on Arxiv!
Aug 2024
- Our new work on an embodiment-aware architecture, Body Transformer, is on Arxiv! Check out the social media thread. We gave a preview of this paper at the RSS EARL Workshop, where it won the Best Poster Award!
Jul 2024
- I will also be speaking at the RSS workshop on Tactile Sensing for General Purpose Robot Learning.
- I will be presenting HumanoidBench at RSS in Delft!
Select Publications
- Show all




Select Talks
Recent invited talk on my humanoid research
The talk below summarizes the vision of my PhD research on tactile sensing (shorter version
An academic talk on my PhD research can be found